


Optical Fiber Strapdown Inertial/Satellite Integrated Navigation System




Khoom nta
FS100 fiber optic integrated navigation system yog tsim los ntawm high-precision kaw-loop fiber-optic gyroscope, quartz
Saj zawg zog accelerometer thiab high-end GNSS txais board, los ntawm multi-sensor fusion thiab kev taw qhia
Realization ntawm aerial xam algorithm, muab high-precision navigation cwj pwm, ceev thiab txoj hauj lwm cov ntaub ntawv rau lub ntiaj teb sab nraud
cov ntaub ntawv kom tau raws li qhov kev ntsuas siab thiab kev tswj xyuas.
Khoom nta
- 0.8nmile / h navigation qib raug
- Kev xaiv ntau hom, hom tsheb / dav hlau hom
- Static pib alignment 3min / co hauv paus pib alignment 8min
- Ua txhaum tus kheej kuaj
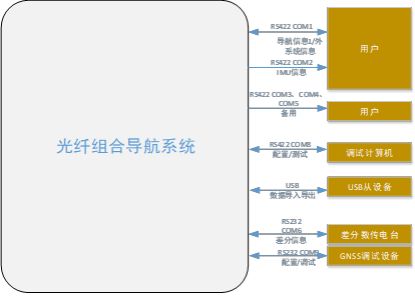
- Kev sib txuam nplua nuj, txhawb RS232, RS422, tuaj yeem thiab lwm yam kev sib tshuam
- Kev ntseeg siab
Daim ntawv thov scenarios
-Intelligent excavation system hauv cheeb tsam mining
- Baseline inertial navigation rau UAVs loj
- marine compass
- self-propelled phom orientation
- Tsheb positioning thiab orientation
- High precision mobile ntsuas
- High precision thiab ruaj khov platform
Cov yam ntxwv hluav taws xob
- Fais fab mov: 24 ~ 36V DC (typ.)
- Rated zog: 30W (max)
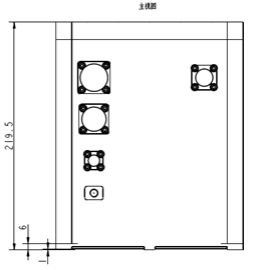
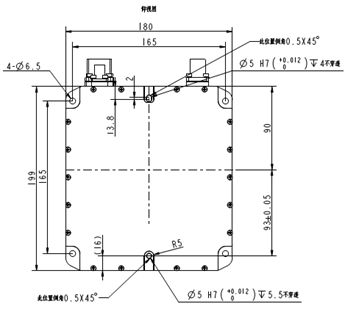
Mechanical Dimensions
Technical ntsuas
| Yam ntxwv | Parameter | Index |
| Txoj hauj lwm tuav | Odometer Combo | 0.001D (D yog mais) |
| GNSS sib xyaw | 1,2m ua | |
| Ntshiab inertia | 0.8nmile/h | |
| Tus cwj pwm raug | Kev sib haum xeeb pib | 0.003 ° |
| Cwj pwm tuav (GNSS neeg tsis taus, ntshiab inertia) | 0.002 ° / 10 min(RMS) | |
| Lub zog hloov pauv | ≤100W (<3s) | |
|
Heading raug | tus kheej nrhiav sab qaum teb | 0.05 ° × sec (Lati), qhov twg Lati txhais tau tias latitude (RMS) |
| Heading tuav (GNSS xiam oob qhab, ntshiab inertia) | 0.003 ° / 10 min(RMS) | |
| Ceev raug | Kev tuav ceev (GNSS xiam oob qhab, ntshiab inertia) | 0.3m / s / 10 feeb(RMS) |
| Optical fiber ntau Gyro | Kev ntsuas ntau | ± 400 ° / s |
| Zero bias stability | ≤0.01 ° / h | |
| Quartz Flexible Accelerometer | Kev ntsuas ntau | ± 20g |
| Zero bias stability | ≤20µg (10s nruab nrab) | |
| Kev sib txuas lus Interface | TSI RS232 | 1 channel (baud tus nqi 9.6kbps ~ 921.6kbps, default 115.2kbps Zaus mus txog 1000Hz, default 200Hz) |
|
| RS422 ua | 6 raws (Baud tus nqi 9.6kbps ~ 921.6kbps, default 115.2Kbps Zaus mus txog 1000Hz, default 200Hz) |
| Cov yam ntxwv zoo | Loj | 199 hli × 180 hli × 219.5 hli (L × W × H) |
| Qhov hnyav | Ib txheej ntawm inertial navigation tsis ntau tshaj 8.0kg (optional aviation applications tsis ntau tshaj 6.5kg) | |
| Siv ib puag ncig
| Cia kub | -40 ℃ ~ 65 ℃ |
| txheeb ze humidity | ≤80% |
Daim ntawv thov piv txwv
| Yam ntxwv | Parameter | Index |
| Txoj hauj lwm tuav | Odometer Combo | 0.001D (D yog mais) |
| GNSS sib xyaw | 1,2m ua | |
| Ntshiab inertia | 0.8nmile/h | |
| Tus cwj pwm raug | Kev sib haum xeeb pib | 0.003 ° |
| Cwj pwm tuav (GNSS neeg tsis taus, ntshiab inertia) | 0.002 ° / 10 min(RMS) | |
| Lub zog hloov pauv | ≤100W (<3s) | |
|
Heading raug | tus kheej nrhiav sab qaum teb | 0.05 ° × sec (Lati), qhov twg Lati txhais tau tias latitude (RMS) |
| Heading tuav (GNSS xiam oob qhab, ntshiab inertia) | 0.003 ° / 10 min(RMS) | |
| Ceev raug | Kev tuav ceev (GNSS xiam oob qhab, ntshiab inertia) | 0.3m / s / 10 feeb(RMS) |
| Optical fiber ntau Gyro | Kev ntsuas ntau | ± 400 ° / s |
| Zero bias stability | ≤0.01 ° / h | |
| Quartz Flexible Accelerometer | Kev ntsuas ntau | ± 20g |
| Zero bias stability | ≤20µg (10s nruab nrab) | |
| Kev sib txuas lus Interface | TSI RS232 | 1 channel (baud tus nqi 9.6kbps ~ 921.6kbps, default 115.2kbps Zaus mus txog 1000Hz, default 200Hz) |
|
| RS422 ua | 6 raws (Baud tus nqi 9.6kbps ~ 921.6kbps, default 115.2Kbps Zaus mus txog 1000Hz, default 200Hz) |
| Cov yam ntxwv zoo | Loj | 199 hli × 180 hli × 219.5 hli (L × W × H) |
| Qhov hnyav | Ib txheej ntawm inertial navigation tsis ntau tshaj 8.0kg (optional aviation applications tsis ntau tshaj 6.5kg) | |
| Siv ib puag ncig
| Cia kub | -40 ℃ ~ 65 ℃ |
| txheeb ze humidity | ≤80% |






