




Kev ntsuas ntsuas qhov system




Khoom nta
MS-100A0 yog peb-degree-ntawm-kev ywj pheej cwj pwm raws li micro-mechanical technology (MEMS)
Kev ntsuas qhov system, built-in high-performance MEMS gyroscope thiab MEMS accelerometer, los ntawm filtering algorithm xam lub suab lub kaum sab xis, yob lub kaum sab xis thiab lub kaum sab xis ntawm cov cab kuj nyob rau hauv lub sij hawm.kuj optionally matched nrog ib tug magnetometer kom tiav high-precision sab qaum teb nrhiav, thiab tso zis 3-axis angular tshaj tawm thiab 3-axis acceleration yog siv rau kev tswj cov lus tsa suab.
Khoom yam ntxwv
- Zoo dua 0.1 ° tus cwj pwm raug
- Kev ntsuas tus cwj pwm ± 90 °
- Ua haujlwm kub ntau: -40 ~ 65 ℃
- Kev vibration ib puag ncig: 10 ~ 2000Hz, 6g (RMS)
- Cov hom kev sib txuam nplua nuj, txhawb RS232, RS422, tuaj yeem thiab lwm yam kev sib tshuam
- Waterproof foob tsim
Cov yam ntxwv hluav taws xob
- Fais fab mov: 5V (typ.), customizable dav voltage input 12 ~ 36V
- Rated zog: 0.5W (max)
- Ripple: 100mV (nruab-rau-peak)
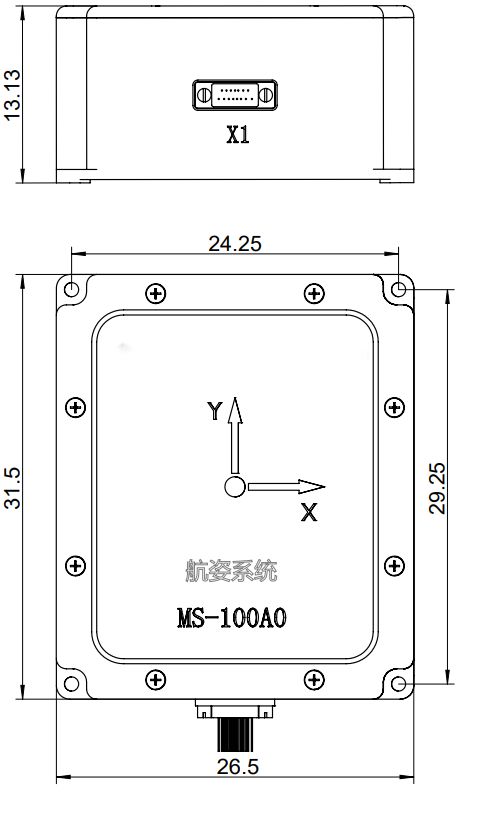
Mechanical Dimensions
Technical ntsuas
| Gyro parameters | ||||
| Parameter |
Kev Xeem | Yam nqi |
Max tus nqi | Chav tsev |
| Dynamic ntsuas ntau yam |
|
| 450 | º/s |
| Zero bias stability | Allan variance, Z axis | 0.8 ua |
| º/h |
| Allan variance, X-axis thiab Y-axis | 1.6 |
| º/h | |
| 10s nruab nrab, X, Y axis (-40 ℃ ~ + 80 ℃, qhov kub thiab txias) | 6 |
| º/h | |
| 1s nruab nrab, X, Y axis (-40 ℃ ~ + 80 ℃, qhov kub thiab txias) | 9 |
| º/h | |
| Zero offset | Zero offset ntau yam | ± 0.2 |
| º/s |
| Zero bias hloov dhau qhov ntsuas kub tag nrho | ± 0.06 |
| º/s | |
| Pib-rau-pib repeatability | 0.006 ib |
| º/s | |
| Ib hnub dhau ib hnub pib rov ua dua | 0.009 ib |
| º/s | |
| Influence of Linear Acceleration on Zero Bias | 0.002 ib |
| º/s | |
| Kev cuam tshuam ntawm kev co ntawm xoom offset, kev hloov ua ntej thiab tom qab kev co | 0.002 ib |
| º/s | |
| Kev cuam tshuam ntawm kev co ntawm xoom offset, kev hloov ua ntej kev co | 0.002 ib |
| º/s | |
| Scale Factor | Scale factor raug, Z axis | 0.3 |
| % |
| Kev ntsuas qhov tseeb, X, Y axis | 0.6 |
| % | |
| Scale factor nonlinearity, Z axis | 0.01 ib |
| %FS | |
| Scale factor nonlinearity, X, Y axis | 0.02 ib |
| %FS | |
| Lub kaum ntse ntse taug kev |
| 0.001 ib |
| °/√hr |
|
Suab nrov ceev |
| 0.001 ib |
| °/s/√hr |
| Kev daws teeb meem |
| 3.052 × 10-7 |
| º/s/LSB |
| Bandwidth |
| 200 |
| Hz |
| Accelerometer Parameters | ||||
| Parameter |
Cov xwm txheej kuaj |
Yam nqi | Max tus nqi | Chav tsev |
| Dynamic ntsuas ntau yam |
| 16 |
| g |
| Zero bias stability | Allan kev sib txawv | 0.03 ib |
| mg |
| 10s nruab nrab (-40 ℃ ~ + 80 ℃, qhov kub thiab txias) | 0.2 |
| mg | |
| 1s nruab nrab (-40 ℃ ~ + 80 ℃, qhov kub thiab txias) | 0 ..3 |
| mg | |
| Zero offset | Zero offset ntau yam | 5 |
| mg |
|
Zero offset variation (peak-to-peak) dhau qhov kub thiab txias tag nrho | 5 |
| mg | |
| Pib-rau-pib repeatability | 0.5 |
| mg | |
| Ib hnub dhau ib hnub pib rov ua dua | 0.8 ua |
| mg | |
| Zero Bias Temperature Coefficient | 0.05 Nws | 0.1 | mg/℃ | |
| Scale factor | Scale factor raug | 0.5 |
| % |
| Scale factor nonlinearity | 0.1 |
| %FS | |
| Ceev random taug kev |
| 0.029 ib |
| m/s/√hr |
| Suab nrov ceev |
| 0.025 ib |
| mg/√Hz |
| Kev daws teeb meem |
| 1.221 × 10-8 |
| g/LSB |
| Bandwidth |
| 200 |
| Hz |
| Magnetometer parameter (yeem) | ||||
| Parameter | Cov xwm txheej kuaj |
Yam nqi | Max tus nqi |
Chav tsev |
| Dynamic ntsuas ntau yam |
| 2.5 |
| gauss |
| Zero offset | Ib puag ncig tsis sib nqus | 15 |
| mgaus |
| Heading raug | ||||
| Magnetic heading raug |
| 0.5 |
| ° |
| Kab rov tav tus cwj pwm raug | ||||
|
Pitch angle raug |
| 0.1 |
| ° |
| Yob lub kaum ntse ntse |
| 0.1 |
| ° |
| Gyro parameters | ||||
| Parameter |
Kev Xeem | Yam nqi |
Max tus nqi | Chav tsev |
| Dynamic ntsuas ntau yam |
|
| 450 | º/s |
| Zero bias stability | Allan variance, Z axis | 0.8 ua |
| º/h |
| Allan variance, X-axis thiab Y-axis | 1.6 |
| º/h | |
| 10s nruab nrab, X, Y axis (-40 ℃ ~ + 80 ℃, qhov kub thiab txias) | 6 |
| º/h | |
| 1s nruab nrab, X, Y axis (-40 ℃ ~ + 80 ℃, qhov kub thiab txias) | 9 |
| º/h | |
| Zero offset | Zero offset ntau yam | ± 0.2 |
| º/s |
| Zero bias hloov dhau qhov ntsuas kub tag nrho | ± 0.06 |
| º/s | |
| Pib-rau-pib repeatability | 0.006 ib |
| º/s | |
| Ib hnub dhau ib hnub pib rov ua dua | 0.009 ib |
| º/s | |
| Influence of Linear Acceleration on Zero Bias | 0.002 ib |
| º/s | |
| Kev cuam tshuam ntawm kev co ntawm xoom offset, kev hloov ua ntej thiab tom qab kev co | 0.002 ib |
| º/s | |
| Kev cuam tshuam ntawm kev co ntawm xoom offset, kev hloov ua ntej kev co | 0.002 ib |
| º/s | |
| Scale Factor | Scale factor raug, Z axis | 0.3 |
| % |
| Kev ntsuas qhov tseeb, X, Y axis | 0.6 |
| % | |
| Scale factor nonlinearity, Z axis | 0.01 ib |
| %FS | |
| Scale factor nonlinearity, X, Y axis | 0.02 ib |
| %FS | |
| Lub kaum ntse ntse taug kev |
| 0.001 ib |
| °/√hr |
|
Suab nrov ceev |
| 0.001 ib |
| °/s/√hr |
| Kev daws teeb meem |
| 3.052 × 10-7 |
| º/s/LSB |
| Bandwidth |
| 200 |
| Hz |
| Accelerometer Parameters | ||||
| Parameter |
Cov xwm txheej kuaj |
Yam nqi | Max tus nqi | Chav tsev |
| Dynamic ntsuas ntau yam |
| 16 |
| g |
| Zero bias stability | Allan kev sib txawv | 0.03 ib |
| mg |
| 10s nruab nrab (-40 ℃ ~ + 80 ℃, qhov kub thiab txias) | 0.2 |
| mg | |
| 1s nruab nrab (-40 ℃ ~ + 80 ℃, qhov kub thiab txias) | 0 ..3 |
| mg | |
| Zero offset | Zero offset ntau yam | 5 |
| mg |
|
Zero offset variation (peak-to-peak) dhau qhov kub thiab txias tag nrho | 5 |
| mg | |
| Pib-rau-pib repeatability | 0.5 |
| mg | |
| Ib hnub dhau ib hnub pib rov ua dua | 0.8 ua |
| mg | |
| Zero Bias Temperature Coefficient | 0.05 Nws | 0.1 | mg/℃ | |
| Scale factor | Scale factor raug | 0.5 |
| % |
| Scale factor nonlinearity | 0.1 |
| %FS | |
| Ceev random taug kev |
| 0.029 ib |
| m/s/√hr |
| Suab nrov ceev |
| 0.025 ib |
| mg/√Hz |
| Kev daws teeb meem |
| 1.221 × 10-8 |
| g/LSB |
| Bandwidth |
| 200 |
| Hz |
| Magnetometer parameter (yeem) | ||||
| Parameter | Cov xwm txheej kuaj |
Yam nqi | Max tus nqi |
Chav tsev |
| Dynamic ntsuas ntau yam |
| 2.5 |
| gauss |
| Zero offset | Ib puag ncig tsis sib nqus | 15 |
| mgaus |
| Heading raug | ||||
| Magnetic heading raug |
| 0.5 |
| ° |
| Kab rov tav tus cwj pwm raug | ||||
|
Pitch angle raug |
| 0.1 |
| ° |
| Yob lub kaum ntse ntse |
| 0.1 |
| ° |


