





Integrated Navigation System




Khoom nta
MS100-B0 integrated navigation system muaj built-in ua tau zoo MEMS gyroscope thiab accelerometer
Thiab satellite navigation module, tuaj yeem ua tiav sab nraum zoov tus cwj pwm siab, ceev, txoj haujlwm
Kev ntsuas.Nrog multi-sensor fusion muaj peev xwm, nws tuaj yeem ua ke nrog lwm cov odometers, speedometers, thiab lwm yam.
Cov ntaub ntawv yog fused kom tswj tau qhov tseeb navigation thaum GNSS tsis raug.
Khoom nta
-0.1 ° tus cwj pwm raug, 2m qhov chaw raug
- Muaj peev xwm ntawm sab nraud auxiliary sensor fusion
- Ua haujlwm kub ntau: -40 ℃ ~ + 60 ℃
- Kev poob siab heev thiab kev vibration tsis kam
- IP65 kaw kaw rau qhov chaw hnyav
- Kev sib txuam nplua nuj, txhawb RS232, RS422, tuaj yeem thiab lwm yam kev sib tshuam
- Kev ntseeg siab
Cov yam ntxwv hluav taws xob
- Fais fab mov: 5V (hom)
- Rated zog: 3W (max)
- Ripple: 100mV (nruab-rau-peak)
Daim ntawv thov scenarios
Los ntawm kev sib piv software rau cov xwm txheej sib txawv, cov khoom tuaj yeem siv dav hauv kev tsim kho tshuab
Kev txawj ntse nrhiav thiab muab tso rau, tsis siv neeg tsis siv neeg tsav tsheb tsis siv neeg, cov khoom siv loj loj qhov chaw tswj xyuas, kev lag luam
industrial drones, thiab lwm yam.
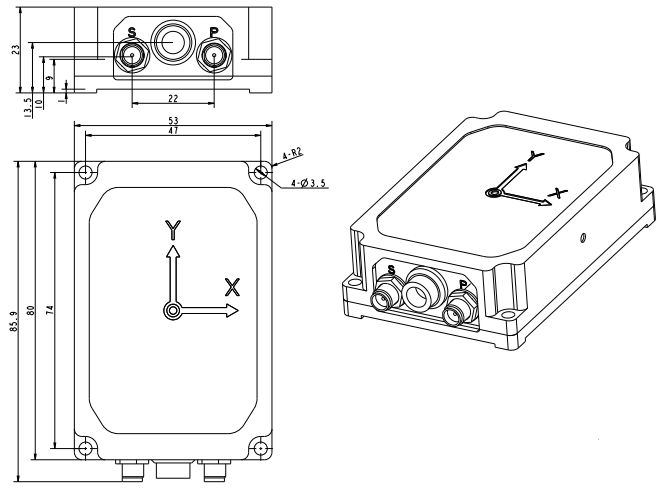
Mechanical Dimensions
Technical ntsuas
| Yam ntxwv | Parameter | Index | Lus ceeb toom |
| Heading raug |
Dual GNSS |
0.1° Nws | 2 m Baseline |
| Ib GNSS | 0.2° Nws | Yuav tsum tau maneuver | |
| Tom qab ua tiav |
0.03° Nws |
| |
| Ua kom precision | 0.2 ° / min | GNSS tsis ua haujlwm | |
| Tus cwj pwm raug | GNSS ua haujlwm zoo | 0.1° Nws | Ib qho taw qhia L1 / L2 |
| Inertia / Odometer Combo | 0.1 ° (RMS) | xaiv tau | |
| Tom qab ua tiav | 0.02° Nws |
| |
| Ua kom precision | 0.2 ° / min | GNSS tsis ua haujlwm | |
| VG mode | 2° | Unlimited GNSS tsis ua hauj lwm lub sij hawm, tsis muaj acceleration | |
| Kab rov tav positioning raug | GNSS ua haujlwm zoo | 1,2m ua | Ib qho taw qhia L1 / L2 |
|
| 2 cm + 1 ppm | RTK | |
| Inertia / Odometer Combo | 2‰D (D txhais tau tias mais, CEP) | xaiv tau | |
| tom qab ua tiav | 1 cm + 1 ppm |
| |
| GNSS tsis ua haujlwm | 20 m | Ua tsis tiav 60s | |
| Kab rov tav ceev raug | GNSS siv tau | 0.1m / s | Ib qho taw qhia L1 / L2 |
| Inertia / Odometer Combo | 0.1m / s (RMS) | xaiv tau | |
| Inertia/DVL ua ke |
0.2m / s (RMS) |
xaiv tau | |
| Gyro | Kev ntsuas ntau | ± 450 ° / s |
|
| Zero bias stability | 2 ° / h | Allan kev sib txawv | |
| Accelerometer | Kev ntsuas ntau | ± 16g | Yuav customized 200 g |
| Zero bias stability | 30 g;ua | Allan kev sib txawv | |
| Kev sib txuas lus Interface
| TSI RS232 | 1 channel | Yeem 1 channel RS422, 1 channel RS232 |
| RS422 ua | 1 channel | Los yog 2 channel RS422, 1 channel TSIS TAU | |
| YOG | 1 channel |
| |
| Odometer sib txawv input | 1 channel | xaiv tau | |
| PPS tso zis | 1 channel | xaiv tau | |
| EVENT input | 1 channel | xaiv tau | |
| Cov yam ntxwv hluav taws xob | Qhov hluav taws xob | 5 ~ 36V DC |
|
| Kev siv fais fab |
≤3W |
| |
| Ripple | 100 mV | PP | |
|
Cov yam ntxwv zoo | Loj | 80mm × 53mm × 23mm |
|
| Qhov hnyav | ≤150g |
| |
|
Siv ib puag ncig | Ua haujlwm kub | -40 ℃ ~ + 60 ℃ |
|
| Cia kub |
-45 ℃ ~ + 65 ℃ |
| |
|
Kev vibration |
20 ~ 2000Hz,6,06g ua |
| |
| Kev cuam tshuam |
30g ua,11ms ib |
| |
| Chav kawm tiv thaiv | IP65 |
| |
|
Kev ntseeg tau | MTBF | 30 000 h |
|
| Lub neej | > 15 xyoo |
| |
| Lub sijhawm ua haujlwm tsis tu ncua |
> 24 h |
| Yam ntxwv | Parameter | Index | Lus ceeb toom |
| Heading raug |
Dual GNSS |
0.1° Nws | 2 m Baseline |
| Ib GNSS | 0.2° Nws | Yuav tsum tau maneuver | |
| Tom qab ua tiav |
0.03° Nws |
| |
| Ua kom precision | 0.2 ° / min | GNSS tsis ua haujlwm | |
| Tus cwj pwm raug | GNSS ua haujlwm zoo | 0.1° Nws | Ib qho taw qhia L1 / L2 |
| Inertia / Odometer Combo | 0.1 ° (RMS) | xaiv tau | |
| Tom qab ua tiav | 0.02° Nws |
| |
| Ua kom precision | 0.2 ° / min | GNSS tsis ua haujlwm | |
| VG mode | 2° | Unlimited GNSS tsis ua hauj lwm lub sij hawm, tsis muaj acceleration | |
| Kab rov tav positioning raug | GNSS ua haujlwm zoo | 1,2m ua | Ib qho taw qhia L1 / L2 |
|
| 2 cm + 1 ppm | RTK | |
| Inertia / Odometer Combo | 2‰D (D txhais tau tias mais, CEP) | xaiv tau | |
| tom qab ua tiav | 1 cm + 1 ppm |
| |
| GNSS tsis ua haujlwm | 20 m | Ua tsis tiav 60s | |
| Kab rov tav ceev raug | GNSS siv tau | 0.1m / s | Ib qho taw qhia L1 / L2 |
| Inertia / Odometer Combo | 0.1m / s (RMS) | xaiv tau | |
| Inertia/DVL ua ke |
0.2m / s (RMS) |
xaiv tau | |
| Gyro | Kev ntsuas ntau | ± 450 ° / s |
|
| Zero bias stability | 2 ° / h | Allan kev sib txawv | |
| Accelerometer | Kev ntsuas ntau | ± 16g | Yuav customized 200 g |
| Zero bias stability | 30 g;ua | Allan kev sib txawv | |
| Kev sib txuas lus Interface
| TSI RS232 | 1 channel | Yeem 1 channel RS422, 1 channel RS232 |
| RS422 ua | 1 channel | Los yog 2 channel RS422, 1 channel TSIS TAU | |
| YOG | 1 channel |
| |
| Odometer sib txawv input | 1 channel | xaiv tau | |
| PPS tso zis | 1 channel | xaiv tau | |
| EVENT input | 1 channel | xaiv tau | |
| Cov yam ntxwv hluav taws xob | Qhov hluav taws xob | 5 ~ 36V DC |
|
| Kev siv fais fab |
≤3W |
| |
| Ripple | 100 mV | PP | |
|
Cov yam ntxwv zoo | Loj | 80mm × 53mm × 23mm |
|
| Qhov hnyav | ≤150g |
| |
|
Siv ib puag ncig | Ua haujlwm kub | -40 ℃ ~ + 60 ℃ |
|
| Cia kub |
-45 ℃ ~ + 65 ℃ |
| |
|
Kev vibration |
20 ~ 2000Hz, 6.06g |
| |
| Kev cuam tshuam |
30 g, 11 m |
| |
| Chav kawm tiv thaiv | IP65 |
| |
|
Kev ntseeg tau | MTBF | 30 000 h |
|
| Lub neej | > 15 xyoo |
| |
| Lub sijhawm ua haujlwm tsis tu ncua |
> 24 h |






